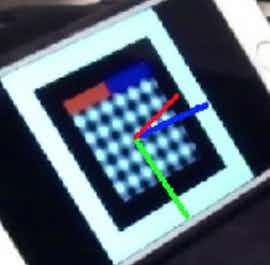
This is an implementation of pose detections for tags. In traditionaly implemenations such as ArUco tags the corners are detected and then a homography is computed to find the pose. To increase accuracy more corners can be added using a checker board pattern.
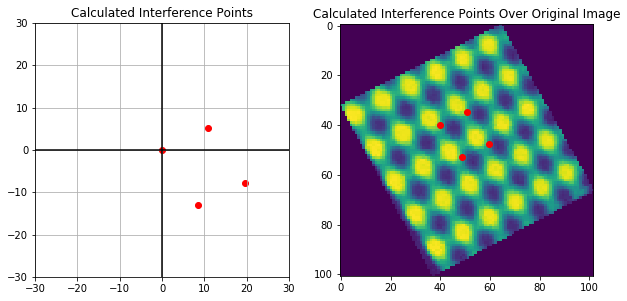
My tags instead use the compression that occurs as a tag is angled away. To more accurately find the angle we print sinusoidal waves along each axis and then use fourier transforms to get precise measurements of the altered frequencys